Khi Zainer vận hành bộ điều khiển, robot giống nhện đang di chuyển đã đứng dậy, sửa lại tư thế như một robot hình người hai chân và bắt đầu đi lại bằng cả hai chân. ” (2024
SIGGRAPH Cảnh trình diễn phác thảo robot KAIST trực tiếp theo thời gian thực tại Châu Á) Viện Khoa học và Công nghệ tiên tiến Hàn Quốc (KAIST) đã tổ chức “S
Được phát triển bởi nhóm nghiên cứu Khoa Thiết kế Công nghiệp của Giáo sư Bae Seok-hyun và nhóm nghiên cứu Khoa Kỹ thuật Cơ khí của Hwang Bo-Jae-min trong thời gian thực trực tiếp tại IGGRAPH Châu Á 2024.
Đã có thông báo rằng công nghệ ``RobostSketch'' đã giành được Giải thưởng Ban giám khảo xuất sắc nhất. "SIGGRAPH Real-time Live" là một đồ họa máy tính
Nó được mệnh danh là “sân khấu trong mơ” trong lĩnh vực tương tác và tương tác. Hàng năm, chỉ có khoảng 10 công nghệ tiên tiến được lựa chọn kỹ càng từ khắp nơi trên thế giới mới được phép đứng trên sân khấu này.
Tất cả các cuộc trình diễn sẽ được tiến hành trong thời gian thực mà không cần ghi trước và phải chứng minh tính nguyên bản cũng như tiềm năng của công nghệ trong thời gian giới hạn là 6 phút. Bản phác thảo robot của KAIST là
Ở giai đoạn này, công ty đã chứng minh tiềm năng của một quy trình thiết kế robot mới, thu hút được nhiều sự chú ý và giành được Giải thưởng Ban giám khảo xuất sắc nhất, giải thưởng chỉ được trao cho một công nghệ.
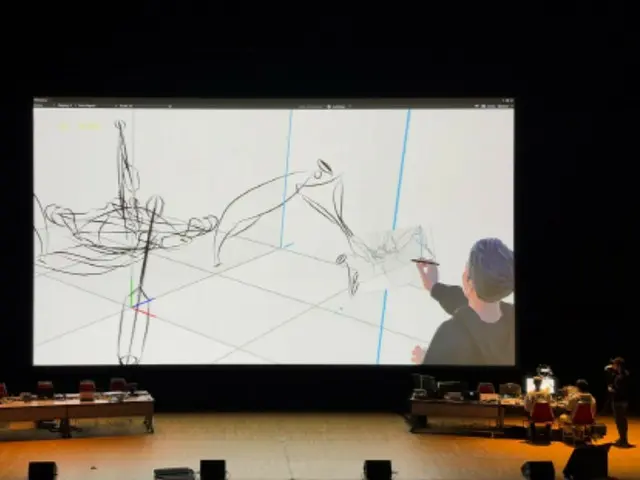
Robot Sketch không chỉ là một công cụ thiết kế thể hiện hình thức và cấu trúc một cách trực quan; nó còn kết hợp các bản phác thảo 3D với AI tổng hợp.
Một công nghệ tiên tiến giúp xác định lại khái niệm thiết kế robot bằng cách kết hợp VR sống động. Các nhà thiết kế sử dụng máy tính bảng và bút để thể hiện trực quan các cấu trúc khớp nối phức tạp trong môi trường VR.
Bạn có thể kiểm tra kích thước thực tế. Robot của nhà thiết kế học cách đi lại và di chuyển trong mô phỏng theo vật lý trong thế giới thực thông qua học tập tăng cường. Đây là nó
Các nhà thiết kế có thể tạo ra các thiết kế robot có thể hoạt động trong thế giới thực trong không gian VR, di chuyển robot trực tiếp và đánh giá tính tự nhiên cũng như độ ổn định của các chuyển động của nó trong thời gian thực.
Bản phác thảo robot được hoàn thành với sự hợp tác của nhóm nghiên cứu của giáo sư Bae và nhóm nghiên cứu của giáo sư Hwang. Giáo sư Bae nói: “Các robot của quá khứ
"Chúng tôi muốn khắc phục những hạn chế của thiết kế robot và tạo ra một công cụ cho phép các nhà thiết kế robot thể hiện mọi thứ họ tưởng tượng trong thời gian thực."
Hơn nữa, “thiết kế robot không chỉ là về hình thức bên ngoài mà còn về chuyển động, chức năng và
là một quá trình bao gồm sự tương tác với người dùng. Tạo điều kiện giao tiếp suôn sẻ giữa các nhà thiết kế robot và kỹ sư robot, giúp giảm đáng kể thời gian và chi phí tạo nguyên mẫu trong thế giới thực.
“Bản phác thảo robot có thể giảm chiều rộng sẽ trở thành một công cụ quan trọng trong quá trình thương mại hóa và phát triển robot trong tương lai.”
2024/12/10 05:57 KST
Copyrights(C) Herald wowkorea.jp 104